- VACTRA-Q
- VACTRA-D
- VACTRA-SP
- VACTRA-Orbit
- VACTRA-Pinnacle
VACTRA-SERIES

7-Axes
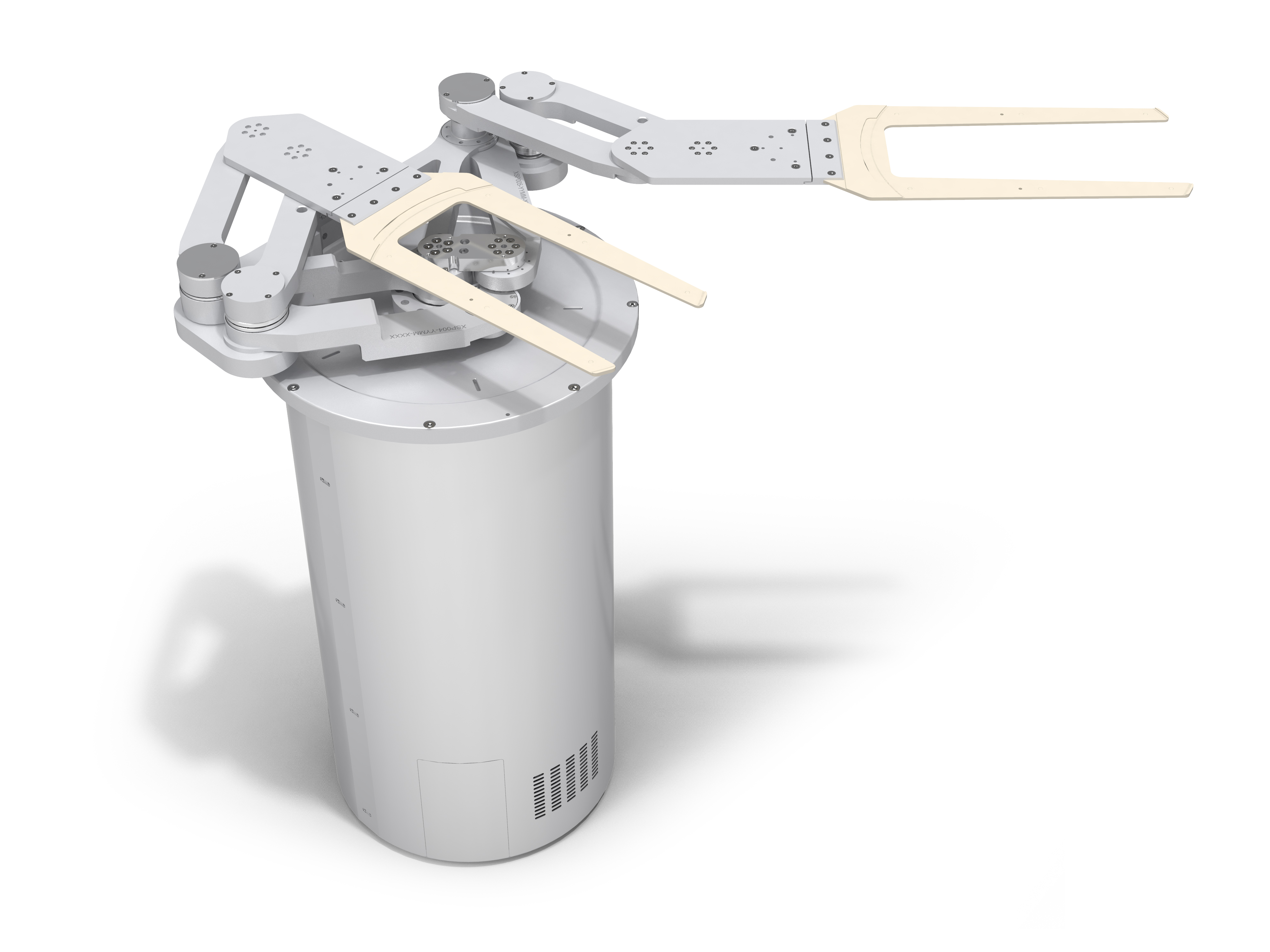
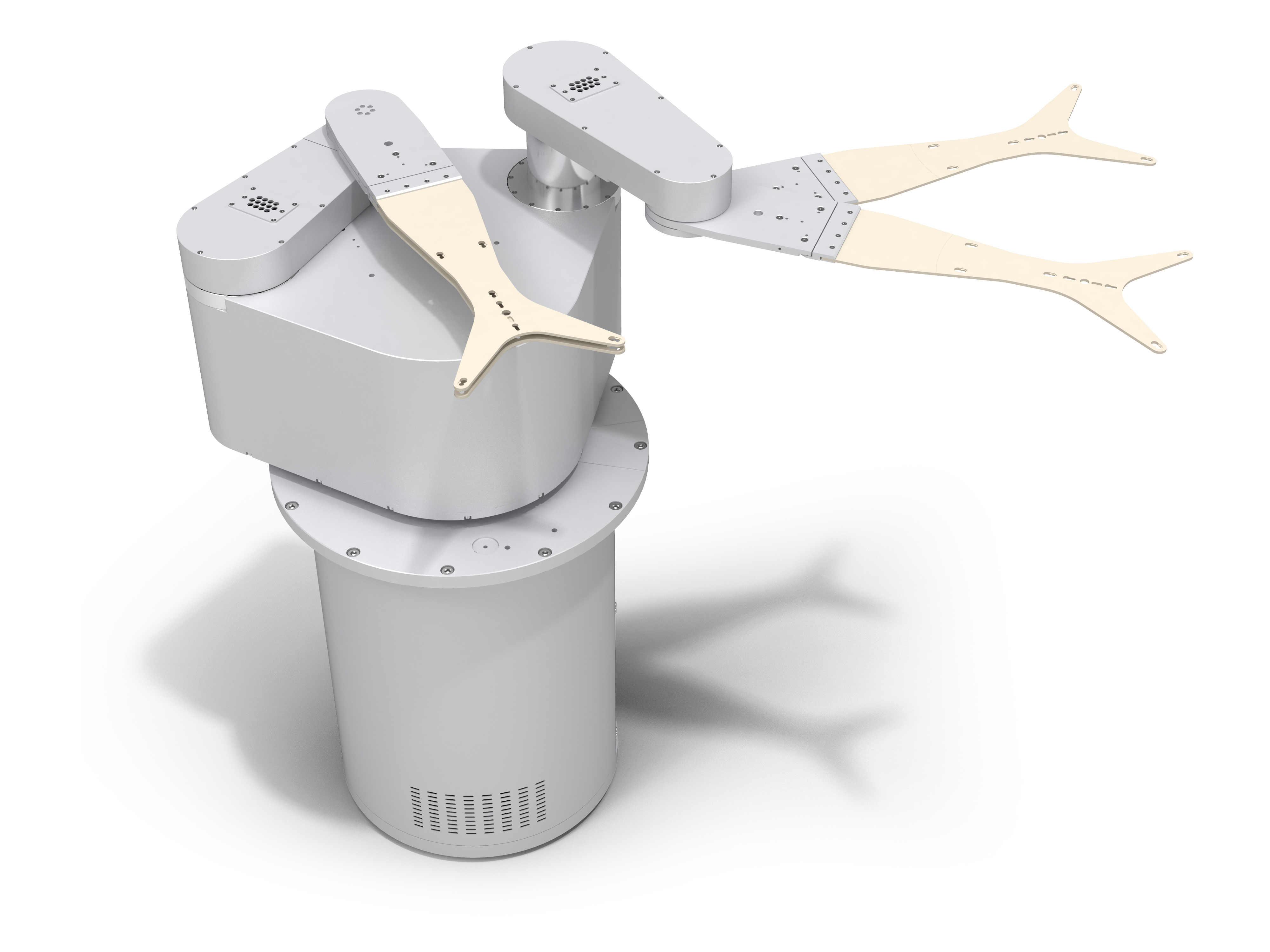
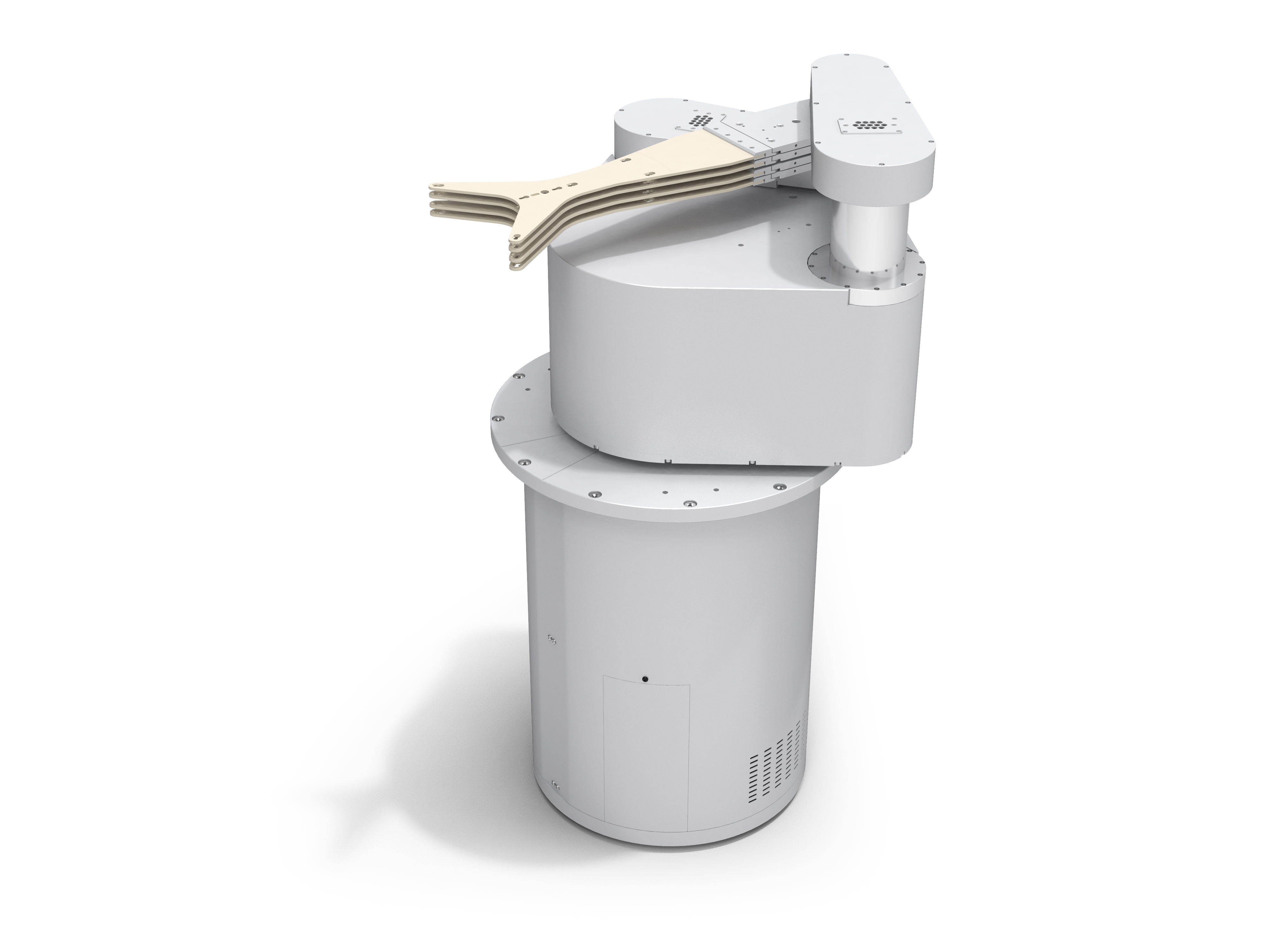
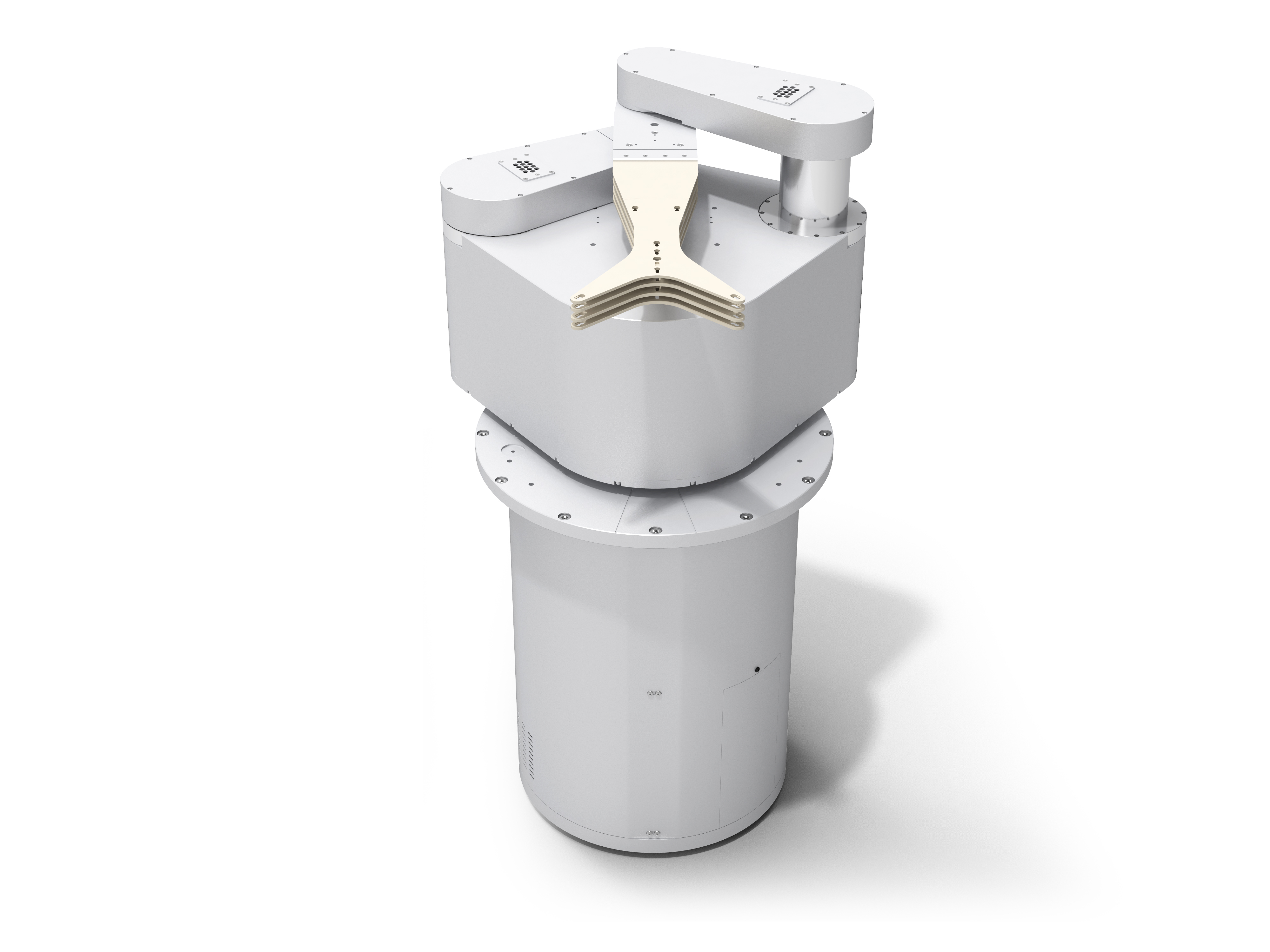
VACTRA-Q
VACTRA-Q는 진공 로봇으로, 반도체 제조 공정에서 고진공 상태에서 웨이퍼를 이송하는 역할을 담당합니다.
- Body Size
- Ø312mm x 935mm
- Rotation Radius
- R496
- Max. Stroke
-
R-Axis ≤ 960mm(C to C)
T-Axis 330°
Z-Axis 150mm
-
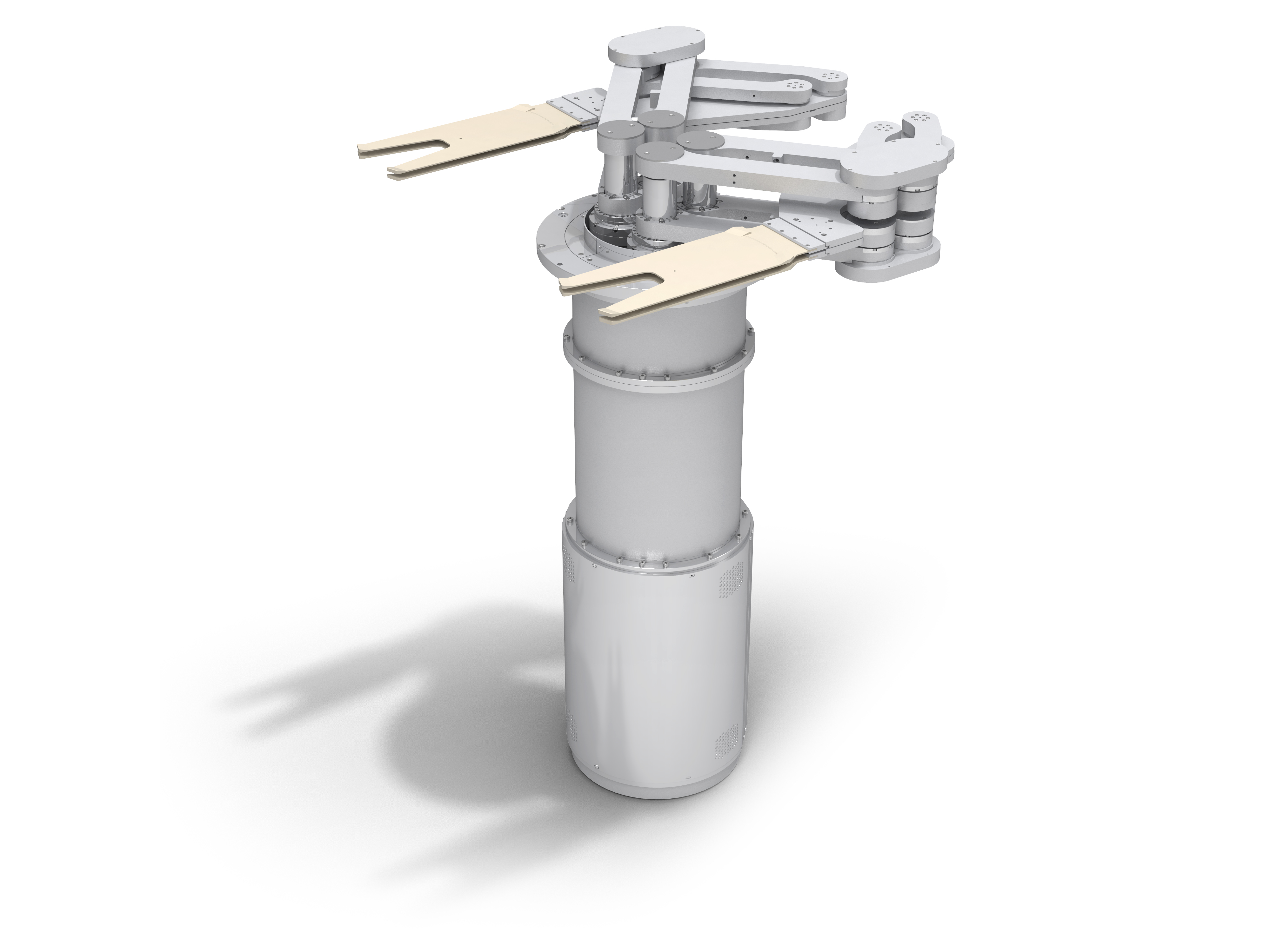
링크 타입 ‘arm’ 모듈
- 높은 반복 정밀도
- 구조 특허 보유
-
높은 AWC 정밀도
- ‘One step’ 위치 보정
-
네 개의 ‘arm’ 개별 동작 가능
- 한 개의 ‘arm’만 개별 제어 가능
VACTRA-SERIES
4-Axes
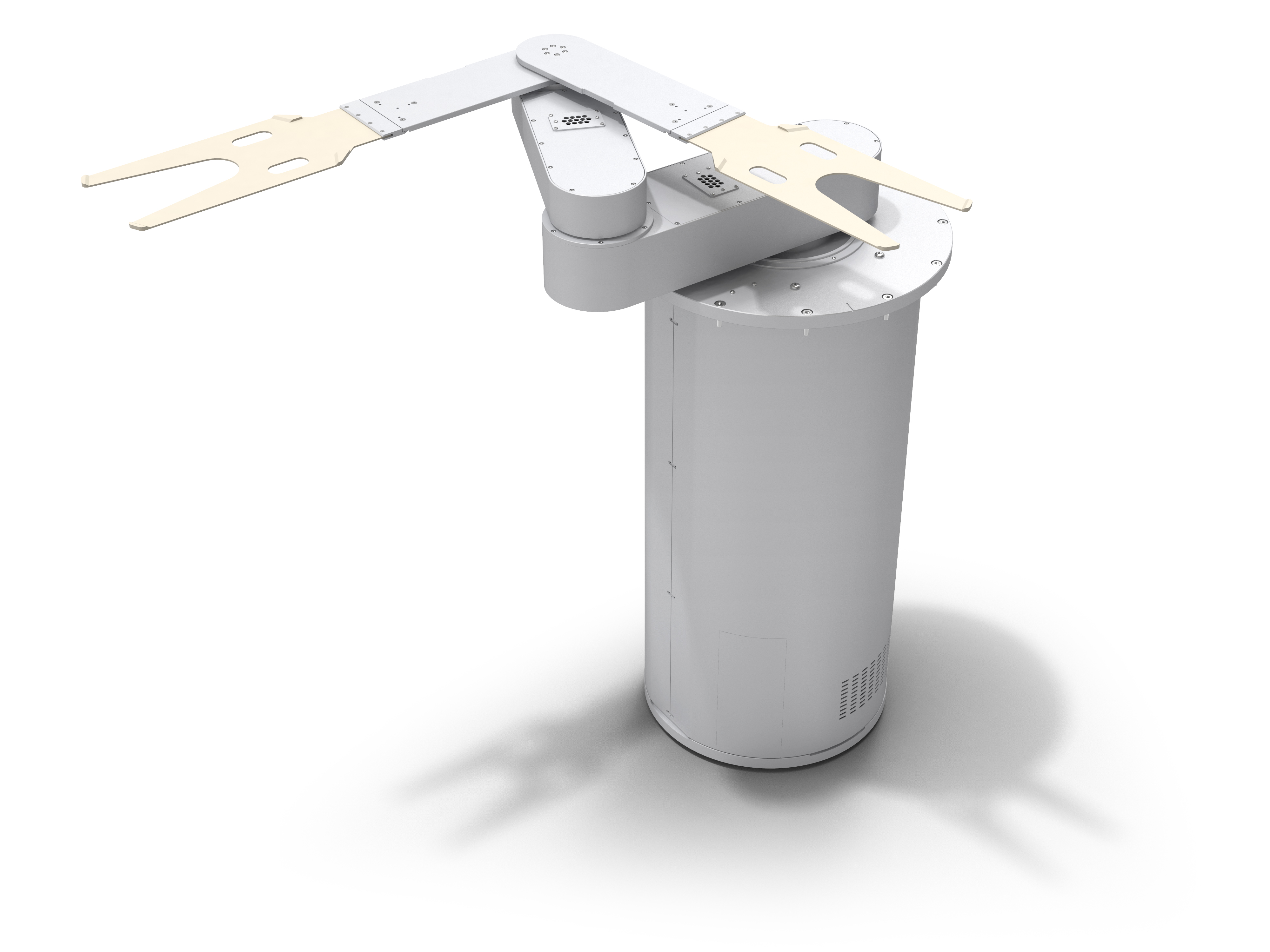
VACTRA-D
VACTRA-D는 VACTRA 시리즈의 또 다른 진공 로봇 모델로, 반도체 제조 공정에서 웨이퍼 이송을 위한 고진공 로봇으로 사용됩니다.
- Body Size
- Ø380mmx540mm, 726mm
- Rotation Radius
- R450mm
- Max. Stroke
-
R-Axis ≤ 1000mm(C to C)
T-Axis 359°
Z-Axis 95mm, 215mm
-

Particle free
-

싱글/듀얼 Pick & Place
-
높은 AWC 정밀도
VACTRA-SERIES
4-Axes
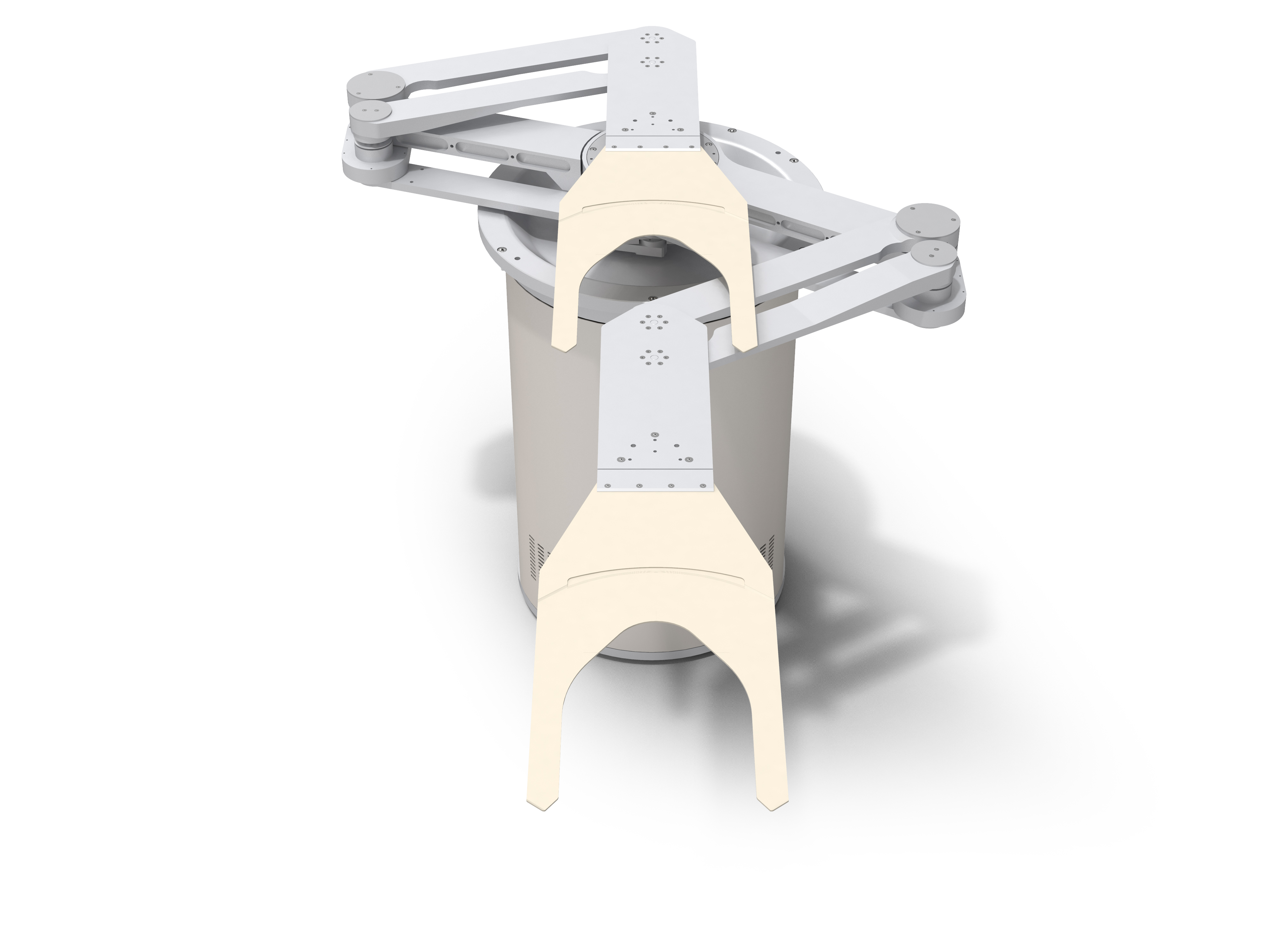
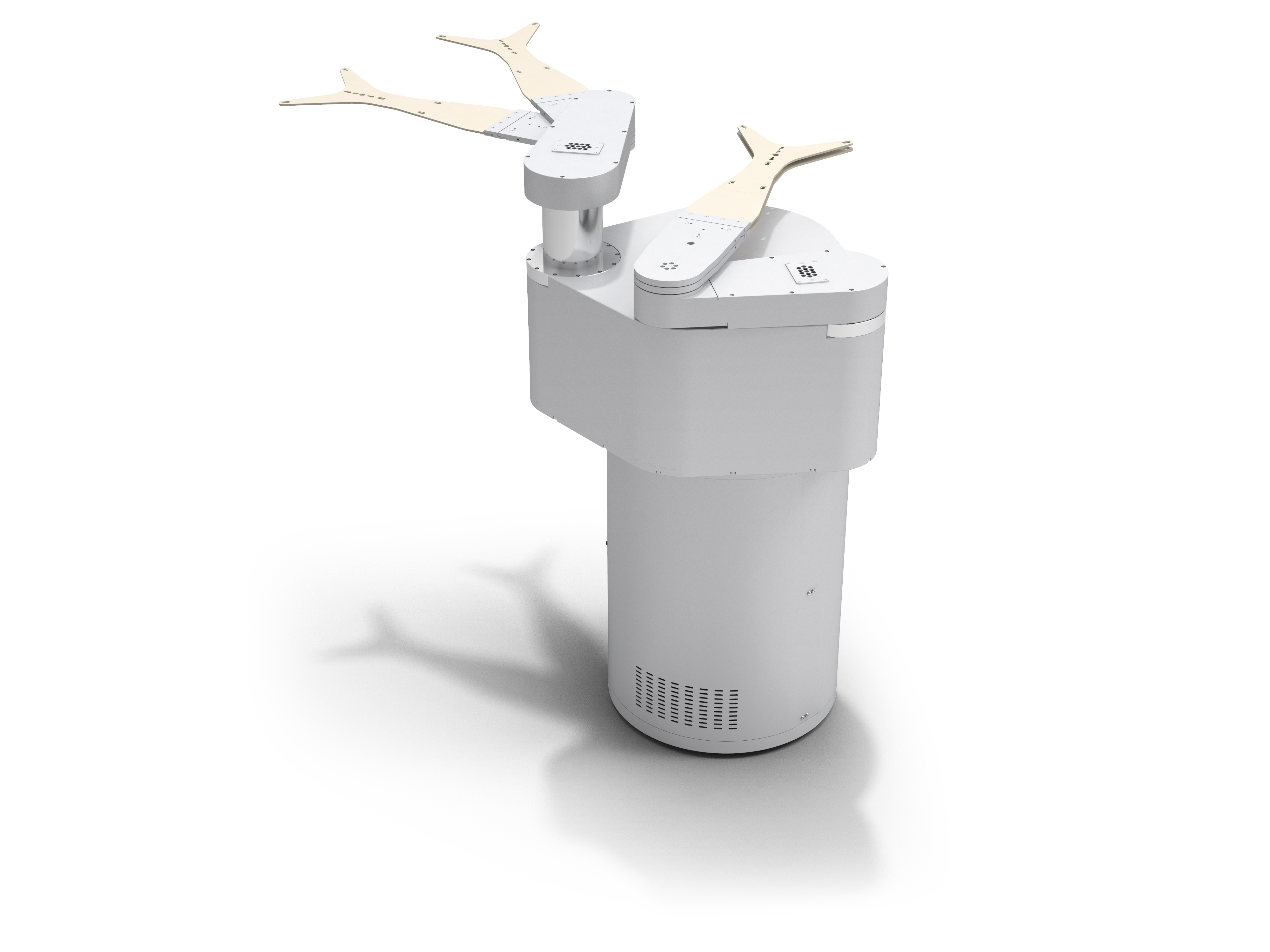
VACTRA-SP
- Body Size
- Ø320mm x 626mm
- Rotation Radius
- R272.5mm
- Max. Stroke
-
R-Axis ≤ 700mm(C to C)
T-Axis 330°
Z-Axis 150mm
-

높은 AWC 정밀도
-

싱글 Pick & Place
-
설치 면적 최소화 (600x600)
VACTRA-SERIES
5-Axes (SCARA)
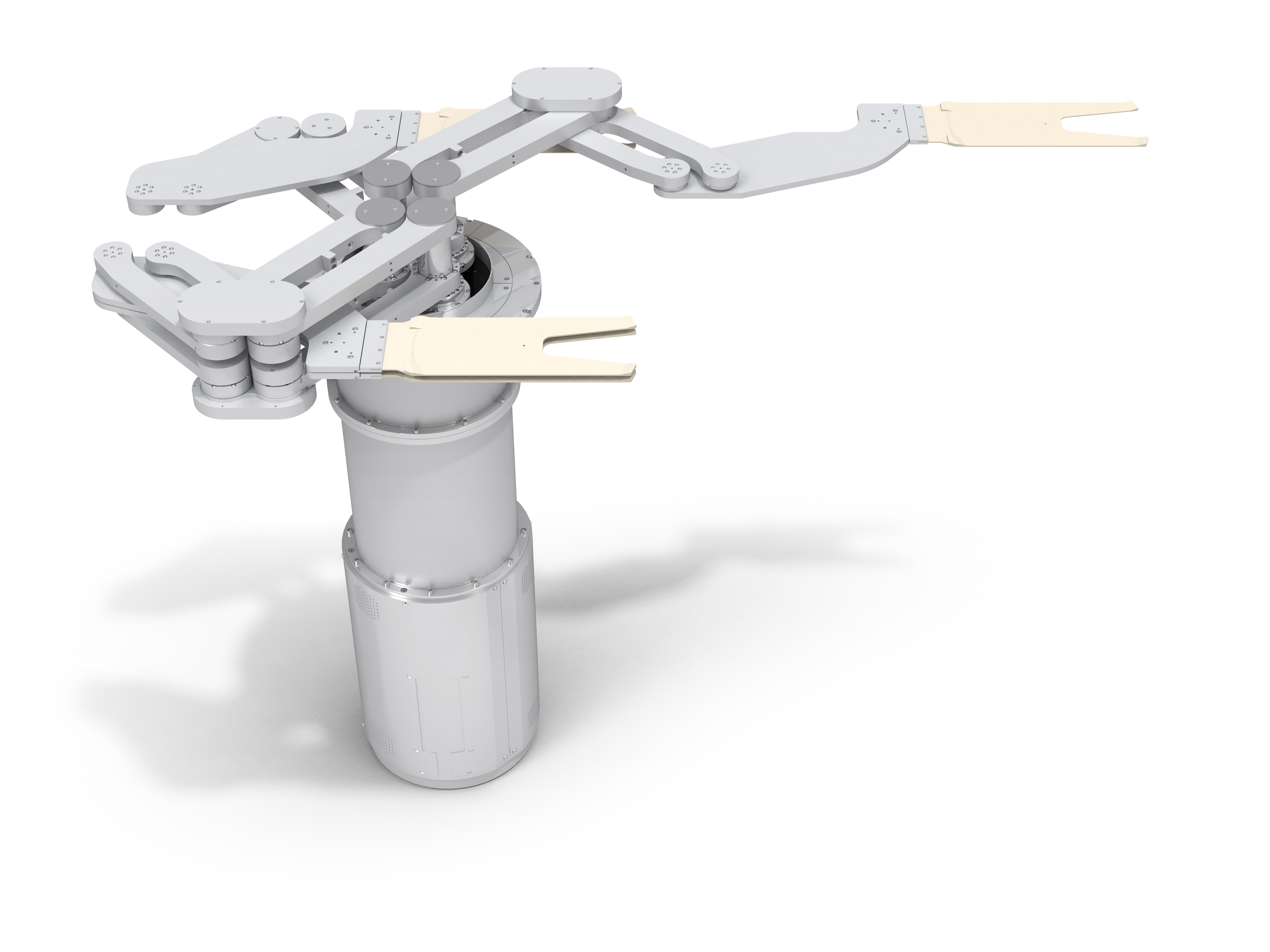
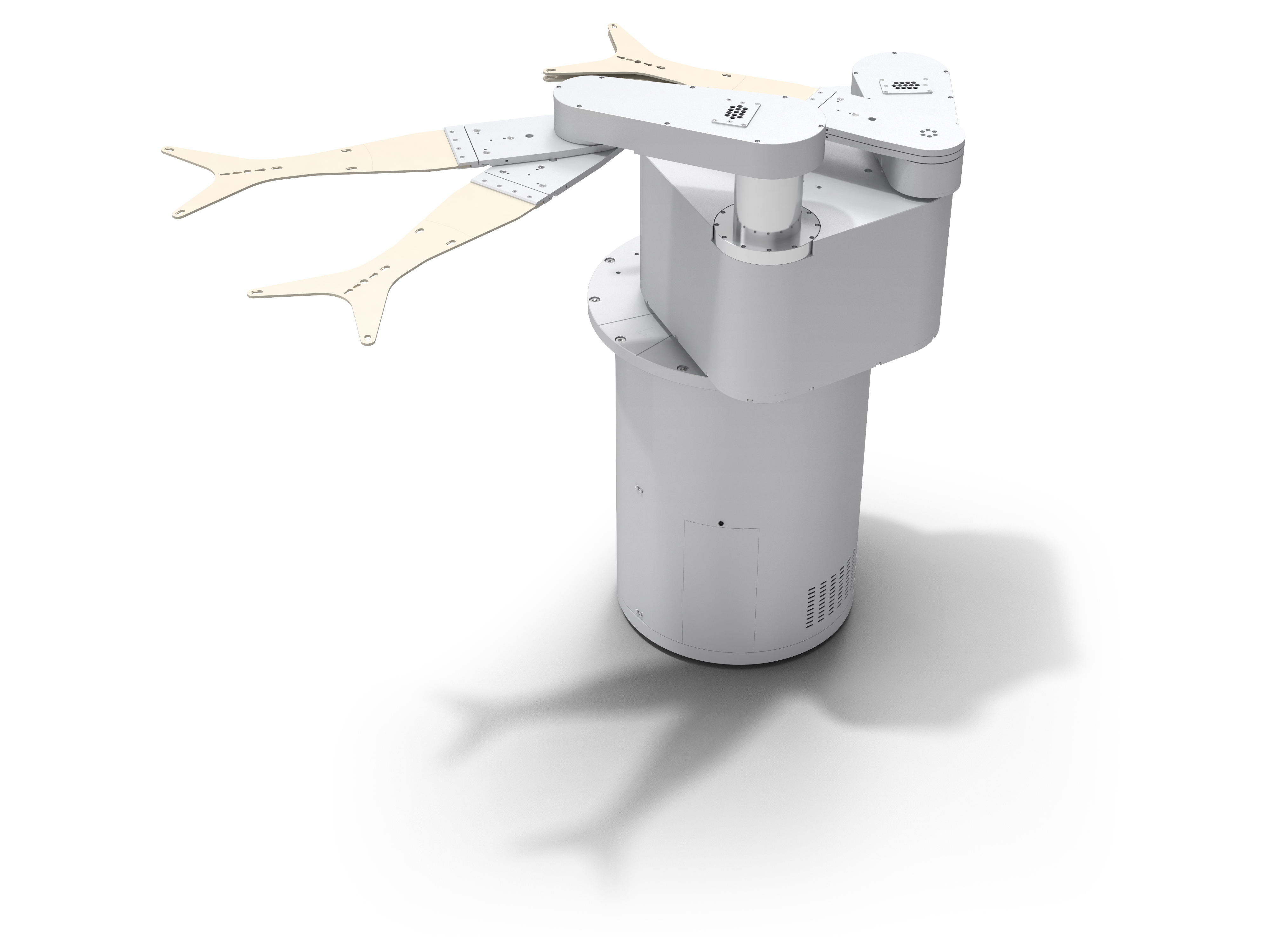
VACTRA-Orbit
- Body Size
- Ø380mm x 810mm
- Rotation Radius
- R375mm
- Max. Stroke
-
R-Axis ≤ 965mm(C to C)
T-Axis 370° (±185°)
Z-Axis 150mm
Hand 370° (±185°)
-

연속 공정 대응 가능 (PM to PM)
-
모든 Hand 개별 제어 가능
-

한 개 Arm, 두 개 Hand 구조
VACTRA-SERIES
8-Axes / Dual(2) Arm, Quad(4) Hand
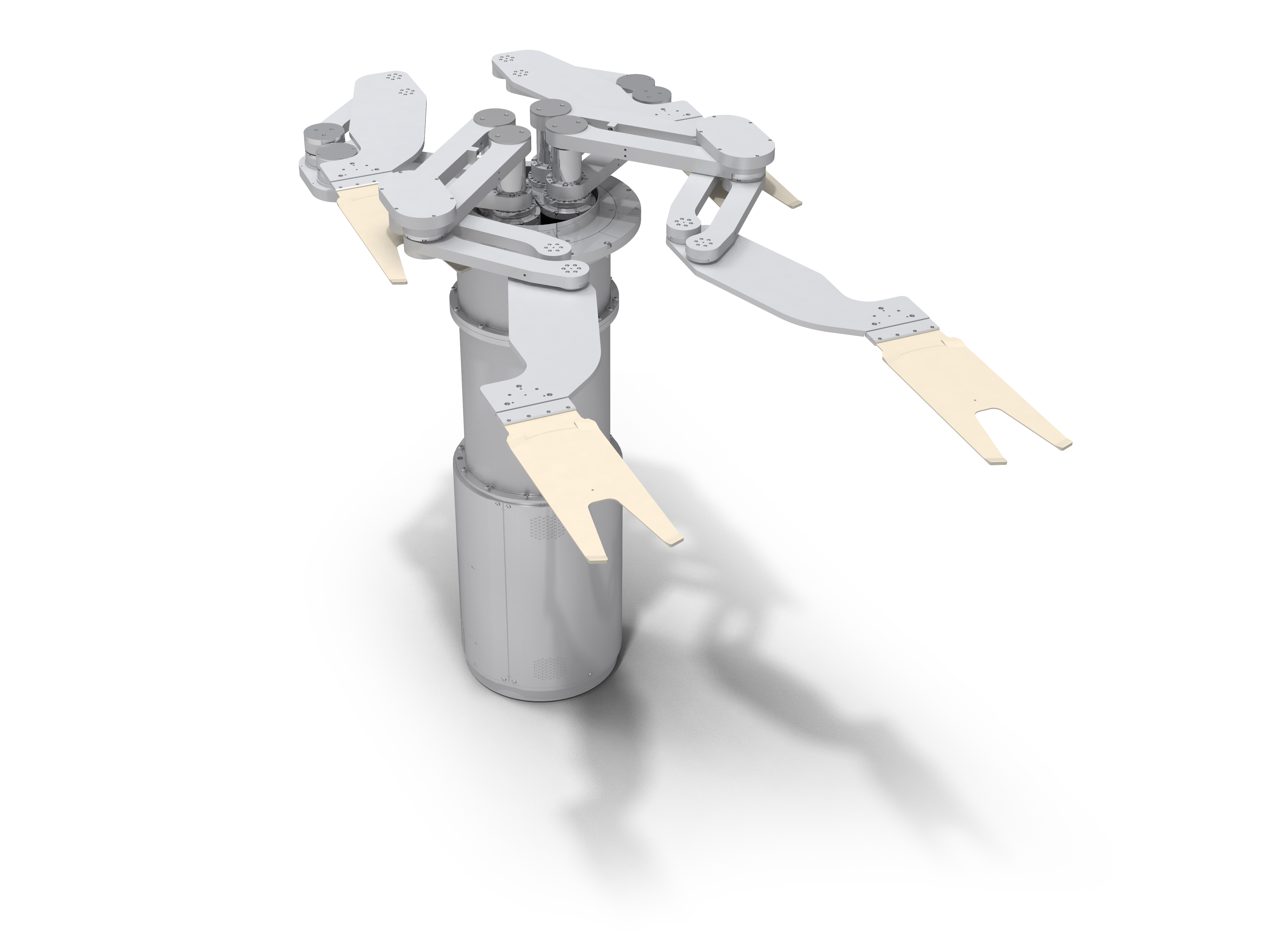
VACTRA-Pinnacle
- Body Size
- Ø372mm x 530mm
- Rotation Radius
- R330mm
- Max. Stroke
-
R-Axis ≤ 680mm(C to C)
T-Axis 330°
Z-Axis 90mm
-
두 개 Arm, 네 개 Hand 구조
-
모든 Hand 개별 제어 가능
-
설치 면적 최소화
-
가위 모션 지원 (Scissor Motion)
-
최소 회전 반경 : 330mm